What is the Moment of Inertia? A 10 Minute Introduction
Table of Contents
Definition/Summary
The moment of Inertia is a property of rigid bodies.
It relates rotational force (torque) to rotational acceleration in the same way that mass relates ordinary (linear) force to ordinary acceleration.
Moment of Inertia has dimensions of distance squared times mass ([itex]ML^2)[/itex].
The moment of Inertia is always relative to a given axis. The same rigid body will usually have different Moments of Inertia for different axes.
Moment of Inertia is additive: the Moment of Inertia of a composite body is the sum of the Moments of Inertia of its parts (relative to the same axis).
Equations
Moment of inertia of rigid body about an axis, where r is the distance from that axis and [itex]\rho[/itex] is the density:
[tex]I\ \ =\ \int dm\ r^2\ =\ \int \rho dxdydz\ r^2[/tex]
(for comprehensive lists of moments of inertia of specific bodies, see See Also)
Moment of momentum (angular momentum) about centre of mass, C:
[itex]\ \ \ \ \boldsymbol{L}_C = I_C\,\boldsymbol{\omega}[/itex] (principal axis case)
[itex]\ \ \ \ \boldsymbol{L}_C = \tilde{I}_C\,\boldsymbol{\omega}[/itex] (general case)
where [itex]\boldsymbol{\omega}[/itex] is parallel to a principal axis, with principal moment of inertia I, and Î is the moment of inertia tensor.
About a general point, P:
[itex]\ \ \ \ \boldsymbol{L}_P = I_C\,\boldsymbol{\omega}\ +\ \vec{PC}\times m\,\boldsymbol{v}_C[/itex] (principal axis case)
[itex]\ \ \ \ \boldsymbol{L}_P = \tilde{I}_C\,\boldsymbol{\omega}\ +\ \vec{PC}\times m\,\boldsymbol{v}_C[/itex] (general case)
Kinetic Energy:
[itex]KE\ =\ \frac{1}{2}\,m\boldsymbol{v}_C^2\ +\ KE_{rot}\ =\ KE_{trans}\ +\ KE_{rot}[/itex], where:
[itex]\ \ \ \ KE_{rot}\,=\,\frac{1}{2}\ \boldsymbol{\omega}\cdot\boldsymbol{L}_C\,=\,\frac{1}{2}\ I_C \omega^2[/itex] (principal axis case)
[itex]\ \ \ \ KE_{rot}\,=\,\frac{1}{2}\ \boldsymbol{\omega}\cdot\boldsymbol{L}_C\,=\,\frac{1}{2}\ \boldsymbol{\omega}^T\boldsymbol{L}_C\,=\,\frac{1}{2}\ \boldsymbol{\omega}^T\tilde{I}_C\boldsymbol{\omega}[/itex] (general case)
Parallel axis theorem (distance [itex]d[/itex] between axes):
[tex]I\ =\ I_C\ +\ md^2[/tex]
Tensor version (displacement [itex]\boldsymbol{d}[/itex] between points):
[tex]\tilde{I}\ =\ \tilde{I}_C\ -\ m(\boldsymbol{d}\times(\boldsymbol{d}\ \times))[/tex]
Period of a pendulum (with small oscillations):
[tex]T = 2 \pi \sqrt{\frac{I}{mgh}}[/tex]
Radius of gyration of a body about an axis (the distance, from the axis, at which an ideal body with the same mass rotating about the same axis will have the same Moment of Inertia):
[tex]\sqrt{\frac{I}{m}}[/tex]
Extended explanation
“about a point”:
WARNING: there is no such thing as a moment of inertia about a point.
In two-dimensional problems, we often say “moment of inertia about a point”, but we really mean “moment of inertia about the axis, through that point, perpendicularly out of the page” :wink:
“about a point” (for a moment of inertia) is perfectly acceptable in two dimensions (even in exam questions), but it does not work at all in three dimensions.
(The angular momentum vector, by comparison, is defined either about an axis or about a point: its magnitude about an axis is the component along that axis of the complete angular momentum vector about any point on that axis: however, there is no moment of inertia vector.)
(The moment of inertia tensor, by comparison, is about a point: it generates the moment of inertia about an axis through that point.)
Axis of rotation:
If one point of a rigid body is fixed, then a whole line of points in the body is stationary. That line (which may change, both in the body itself and in space) is the (instantaneous) axis of rotation.
For a freely-moving rigid body, the axis of rotation is usually (but not always) taken to be through its center of mass. Any parallel axis will also do.
General principles:
For a rigid body moving without rotation, every part of it has the same speed, and so the kinetic energy of the body is given by the general expression: [itex]KE\ =\ (1/2)mv_C^2[/itex] where [itex]v_C[/itex] is the speed of its center of mass.
But if it is rotating, the speed of each part depends on its distance from the (instantaneous) axis of rotation.
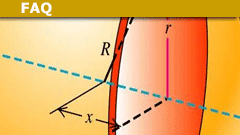
For example, if that axis goes through the center of mass, then [itex]v^2\ =\ v_C^2\ +\ \omega^2r^2[/itex], where [itex]\omega[/itex] is the angular velocity, and [itex]r[/itex] is the perpendicular distance from the axis.
Imagine an object, with a fixed axis, being divided into infinitesimally small pieces, each at distance [itex]r_i[/itex] from the axis, and of mass [itex]\delta m_i[/itex], so that its total mass is [itex]M\ =\ \sum_i \delta m_i[/itex]
The kinetic energy now becomes the sum of the KEs of each of these tiny pieces:
[itex]KE\ =\ \sum_i KE_i\ =\ (1/2)\sum_i \delta m_i v_i^2[/itex]
But [itex]v_i\ =\ \omega r_i[/itex], so [itex]KE\ =\ (1/2)\sum_i \delta m_i \omega ^2 r_i^2\ =\ (1/2) \omega ^2 \sum _i \delta m_i r_i^2[/itex]
We can write this as: [itex]KE\ =\ (1/2)I\omega ^2[/itex] where I is given by: [itex]I\ =\ \sum _i \delta m_i r_i^2[/itex]
In the limit where the the object is broken up into infinitely many pieces, the sum is replaced by an integral, giving the Moment of Inertia of the object about the specified axis: [itex]I\ =\ \int r^2dm [/itex]
There is a similar derivation for the formula for the angular momentum vector, [itex]\boldsymbol{l}\ =\ I \boldsymbol{\omega}[/itex]
Four formulas:
There are four principal formulas to know for a moment of inertia, and they are:
1. of a point mass m about an axis, I = mr², where r is the distance between the point mass and the axis.
2. of a uniform rod of mass m and length 2L about an axis through its midpoint and perpendicular to its length, I = ⅓mL².
3. of a rectangular lamina of mass m, length 2L, and any width about an axis which bisects the length, I = ⅓mL².
4. of a circular disc of mass m and radius r about an axis through its center and perpendicular to the disc, I = ½mr².
For other formulas, see the list in Wikipedia.
Moment of inertia tensor:
Surprisingly, angular momentum is not generally aligned with rotation.
The angular momentum vector is only aligned with the axis of rotation of a rigid body if that axis is a principal axis of the body.
Since the angular momentum vector of an unforced rigid body must be constant (in space), the axis of rotation (if not already aligned along with it) must move around it: this is precession.
The moment of inertia tensor converts the angular velocity vector of a rigid body into the angular momentum vector: [itex]\tilde{I}\,\boldsymbol{\omega}\ =\ \boldsymbol{L}[/itex]
A tensor converts one vector to a different vector.
The eigenvectors of the moment of inertia tensor of a rigid body are its principal axes, and the eigenvalue of each principal axis is the (ordinary) moment of inertia about that axis.
Every rigid body has either:
i] three perpendicular principal axes
ii] principal axes in every direction in a particular plane (all with the same moment of inertia), and a perpendicular principal axis
iii] principal axes in every direction (all with the same moment of inertia)
In particular, any axis of rotational symmetry of a rigid body is a principal axis.
Angular momentum:
The rate of change of the angular momentum vector of a rigid body about any point equals the net torque vector about that point (the moment of all the external forces acting on that body):
[tex]\boldsymbol{\tau}_{net}\ =\ \frac{d\boldsymbol{L}}{dt}\ =\ \frac{d}{dt}\left(\tilde{I}\,\boldsymbol{\omega} \right)\ =\ \tilde{I}\,\frac{d}{dt}\left(\boldsymbol{\omega} \right)\ +\ \frac{d\tilde{I}}{dt}\left(\boldsymbol{\omega} \right)[/tex]
the point must be stationary, or must have a velocity equal (or parallel) to the velocity of the centre of mass: that includes the centre of mass itself, and the (moving) instantaneous point of contact with a fixed surface (whether rolling or skidding) where the normal to the surface always passes through the centre of mass
Although I is fixed in the body, it is not fixed in space, and so dI/dt is not zero, unless ω lies along a principal axis.
If ω does lie along a principal axis, with eigenvalue I[SUB]A[/SUB], then the angular momentum vector is:
[tex]\boldsymbol{L}\ =\ \tilde{I}\,\boldsymbol{\omega}\ =\ I_A\,\boldsymbol{\omega}[/tex]
and so, taking components in that direction, if ω is fixed in that direction, then the torque about that axis equals the (ordinary) moment of inertia about that axis times the angular acceleration:
[tex]\tau_{net}\ =\ \frac{dL}{dt}\ =\ I_A\,\frac{d\omega}{dt}[/tex]
In lists of (ordinary) moments of inertia about an axis, that axis is always a principal axis. :wink:
Rotating frame and Euler’s equations:
However, if we change to a frame of reference fixed in the body, and therefore rotating with it, then [itex]d\tilde{I}/dt[/itex] is zero, but there is an added “cross” term:
[tex]\boldsymbol{\tau}_{net}\ =\ \frac{d\boldsymbol{L}}{dt}\ +\ \boldsymbol{\omega}\times \boldsymbol{L}\ =\ \frac{d}{dt}\left(\tilde{I}\,\boldsymbol{\omega} \right)\ \ +\ \ \boldsymbol{\omega}\times \left(\tilde{I}\,\boldsymbol{\omega}\right)\ =\ \tilde{I}\,\frac{d}{dt}\left(\boldsymbol{\omega} \right)\ \ +\ \ \boldsymbol{\omega}\times \left(\tilde{I}\,\boldsymbol{\omega}\right)[/tex]
which, expressed relative to three perpendicular axes fixed in the body along principal axes with moments of inertia [itex]I_1\ I_2\ \text{and}\ I_3[/itex], gives the three Euler’s equations:
[tex]\tau_1\ =\ I_1\,\frac{d\omega_1}{dt} + (I_3\ -\ I_2)\omega_2\omega_3[/tex]
[tex]\tau_2\ =\ I_2\,\frac{d\omega_2}{dt} + (I_1\ -\ I_3)\omega_3\omega_1[/tex]
[tex]\tau_3\ =\ I_3\,\frac{d\omega_3}{dt} + (I_2\ -\ I_1)\omega_1\omega_2[/tex]
Composite body … the parallel axis theorem:
(Sometimes called “Steiner’s theorem”, or even the “Huygens-Steiner theorem”)
The simple formulas ([itex]\boldsymbol{L}\ =\ I\boldsymbol{\omega}\ +\ \boldsymbol{r}\times m\,\boldsymbol{v}[/itex] etc) only work for I about an axis through, or for Î at, the centre of mass.
For a composite body, we must use I or Î relative to the combined center of mass, which we obtain by adding I or Î of each individual part, not, of course, relative to its own center of mass, but to the combined centre of mass.
This “off-center” moment of inertia of each individual part is:
[tex]I = I_C\ +\ md^2[/tex]
where m is the mass of the part, [itex]I_C[/itex] is its moment of inertia about the parallel axis through its own center of mass, and d is the (perpendicular) distance of the combined center of mass from that axis.
The parallel axis theorem has no other useful purpose. :wink:
The perpendicular axis theorem:
The Moment of Inertia of a lamina (an ideal two-dimensional body) about an axis perpendicular to the lamina is the sum of its Moments of Inertia about any pair of axes in the plane of the lamina which are perpendicular to the first axis and to each other: [itex]I = I_x\,+\,I_y[/itex]
Comparison with Inertia:
The name “Moment of Inertia” suggests rotational inertia, the rotational analog of mass (inertia) for linear motion.
This is not a good name, since Moment of Inertia has dimensions of mass times distance squared, while Moment usually has dimensions of distance, and inertia has dimensions of mass (or arguably mass times distance over time), so “Moment” times “Inertia” should have dimensions of mass times distance (or arguably mass times distance squared over time). :frown:
Isaac Newton, incidentally, described inertia as follows: “The vis insita, or innate force of matter is a power of resisting, by which everybody, as much as in it lies, endeavors to preserve in its present state, whether it be of rest, or of moving uniformly forward in a right line.”
Also called mass moment of inertia:
Structural engineers sometimes use the name “moment of inertia” for the second moment of area, and (so as to avoid confusion) call the (usual) moment of inertia the mass moment of inertia, yet denote both by the same letter, ([itex]I[/itex]).
Of course, there is no connection: the second moment of the area has units of length to the fourth power ([itex]L^4[/itex]), and measures a body’s resistance to bending stress perpendicular to an axis, while (mass) moment of inertia has units of mass times length squared ([itex]ML^2[/itex]), and relates angular acceleration to torque ([itex]\tau\ =\ I\alpha[/itex]).
(Similarly, sometimes the name “polar moment of inertia” is used for the polar moment of area)
This article was authored by several Physics Forums members with PhDs in physics or mathematics.








Leave a Reply
Want to join the discussion?Feel free to contribute!